
Details
Supported Connection Devices
| Manufacturer | Product Name | Series | Note |
|---|---|---|---|
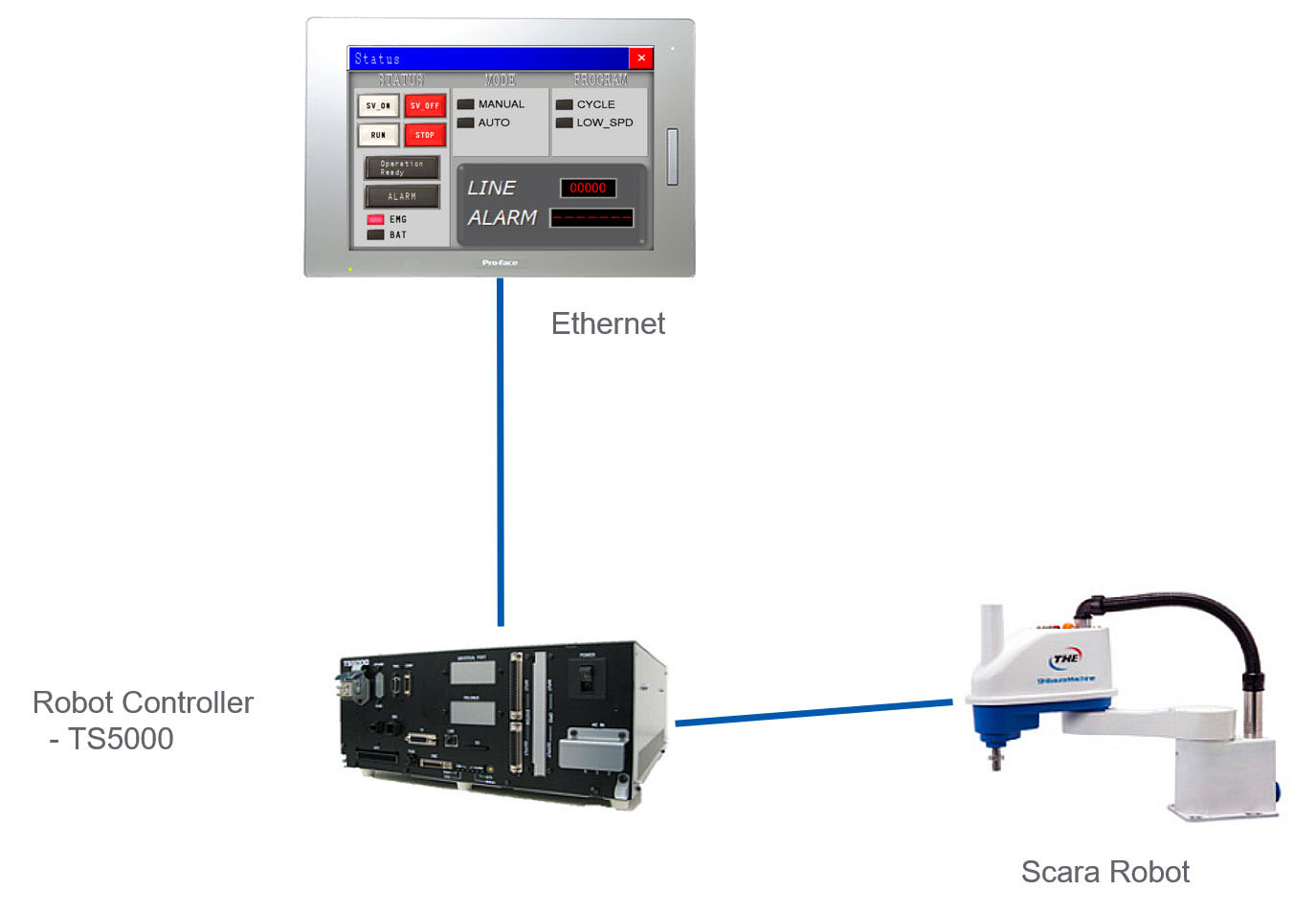
| Shibaura Machine Corporation | Robot Controller | - | TS5000 |
In addition, there are optional features that cannot be used along with this feature, so please contact the Shibaura Machine Corporation if you wish to use them.
Target HMI
| Series | Resolution | Display unit type of the sample project file*1 | Screen Editor |
|---|---|---|---|
| GP4000 Series SP5000 Series SP5000X Series ST6000 Series | 640 x 480 dot(VGA) | GP-4501T(Analog Touch Panel) | GP-Pro EX Ver. 4.00.000 or later |
| 800 x 480 dot(WVGA)*2 | Box Module:SP-5B10 Display Module:SP-5400WA | ||
| GP4000 Series | 320 x 240 dot(QVGA) | GP-4301T |
*1If you use the other models, you can change a model in the GP-Pro EX project file. For details, please refer to the Technical Guide.
*2For WVGA (800×480 pixels),there is function button area at the right of the screen. Please read the manual, "Functions Added to Sample Project File for SP5000 Wide Model".
Features
- Robot Controller status can be checked on a GP unit.
- Batch monitoring of the state of signals being communicated between the robot and internal PLC (interface relay state).
Bits can also be forcibly set and reset. - Acquire and display the robot's current position.
- Alarm history can be viewed on a GP unit.
- The alarm history can be checked by displaying the robot controller data.
- " Alarm reset", “Program reset", “Signal reset" and “Buzzer off" instructions can be output to the controller.
- As maintenance functions, device monitor, I/O monitor time chart, and data transfer to connected device screens have been prepared.
* If you do not have a communication driver that corresponds to GP-Pro EX when using the project data, please download it from our website.
Terms of use / Cautions
We do not guarantee that the operation of this sample will be uninterrupted or error-free.
Please acknowledge the following terms of use before you use our download service.Download of any file signifies your agreement to the terms of use.
Terms and conditions
Download file

GP-4501T / VGA(640*480)
3.50 MB (3,668,292 Byte)
SP-5400WA / WVGA(800*480)
3.50 MB (3,672,530 Byte)
GP-4301T / QVGA(320*240)
2.93 MB (3,070,294 Byte)
Update History
[Rev 04] (2024/04/02)
- Deleted “It is necessary to incorporate a dedicated ladder logic program into the robot controller.”
[Rev 03] (2021/10/15)
- Modify connection setting Added supported robot controller version
[Rev 02] (2021/04/20)
- Change the description of communication settings
[Rev 01] (2021/03/26)
- New Release
Summary
This sample project file is for connecting GP4000 / SP5000 / SP5000X / ST6000 Series with the robot controller TS5000 manufactured by Shibaura Machine Corporation. When using the Robot, we provide functions to use more convenient.