
Details
Supported Connection Devices
| Manufacturer | Product Name | Series | Model |
|---|---|---|---|
| FANUC Corporation | Robot Controller | R-30iB / R-30iB Mate | - |
Target HMI
| Series | Resolution | Display unit type of the sample project file*1 | Screen Editor |
|---|---|---|---|
| GP4000 Series SP5000 Series SP5000X Series | 640 x 480 dot(VGA) | GP-4501T | GP-Pro EX Ver.4.03.000 or later |
| 800 x 480 dot(WVGA)*2 | Box Module:SP-5B10 Display Module:SP-5400WA | ||
| GP4000 Series | 320 x 240 dot(QVGA) | GP-4301T |
*1If you use the other models, you can change a model in the GP-Pro EX project file. For details, please refer to the Technical Guide.
*2For WVGA (800×480 pixels),there is function button area at the right of the screen. Please read the manual, "Functions Added to Sample Project File for SP5000 Wide Model".
Features
- Easily connect to a robot controller of the R-30ib/R-30iB Mate Series.
- Able to check input/output status of standard IO (DO, DI, RI, RO, UI, UO).
- Display values of standard devices (R, PR, SR).
- Able to check alarms occurring on a robot controller and their detailed information.
- Provide monitoring screens of greasing up and battery replacement time for a maintenance screen
We do not guarantee that the operation of this sample will be uninterrupted or error-free.
Terms of use / Cautions
Please acknowledge the following terms of use before you use our download service.Download of any file signifies your agreement to the terms of use.
Terms and conditions
Download file

For GP-4501T / VGA(640*480)
3.84 MB (4,022,111 Byte)
For SP-5400WA / WVGA(800*480)
5.86 MB (6,146,880 Byte)
For GP-4301T / QVGA(320*240)
2.92 MB (3,061,628 Byte)
Update History
[Ver.1.00b] (2022/09/22)
Corrected the name of the connected device in the technical guide.
[Ver.1.00a] (2020/04/24)
Update Technical Guide 4.2. Target HMI Devices
[Ver.1.00] (2012/07/19)
New
Summary
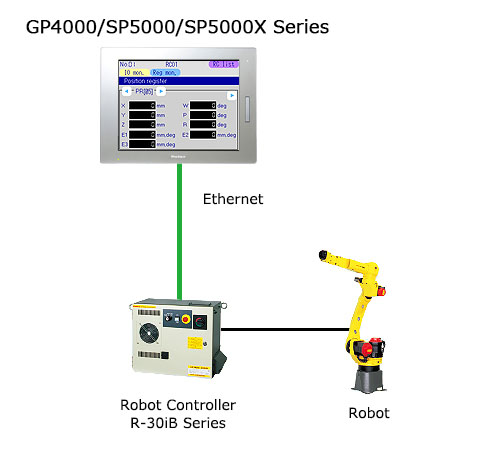
This sample project file is for connecting GP4000 Series and SP5000 Series with the robot controller R-30iB/R-30iB Mate manufactured by FANUC Corporation. When using the Robot, we provide functions to use more conveniently.